

















技术亮点
-

优雅外观 再续经典
兼顾设计美学与机械动态性能
-
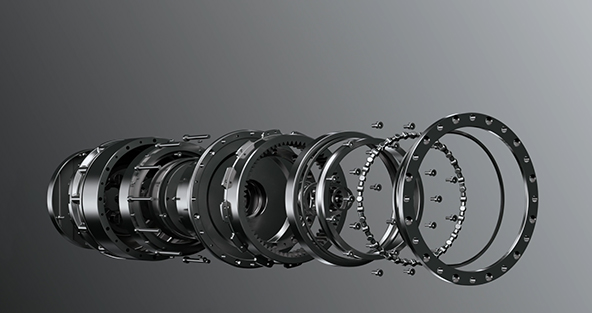
全栈式自研关节设计
一体化关节模组,峰值扭矩高达130N·m
-

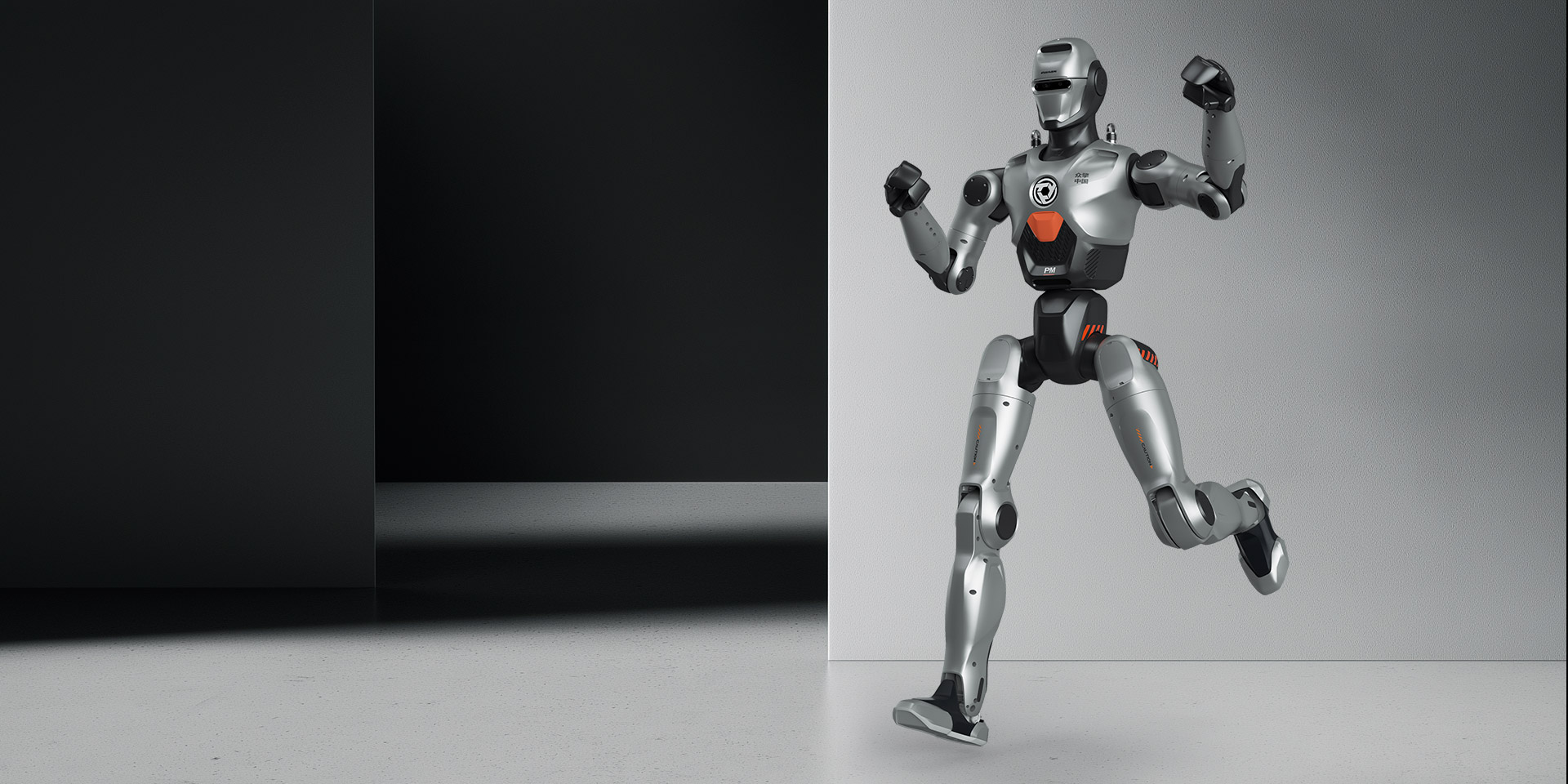
卓越运动能力
全身自由度≥23,腰部可实现320°旋转,可实现高难度舞蹈动作“斧头舞”
-

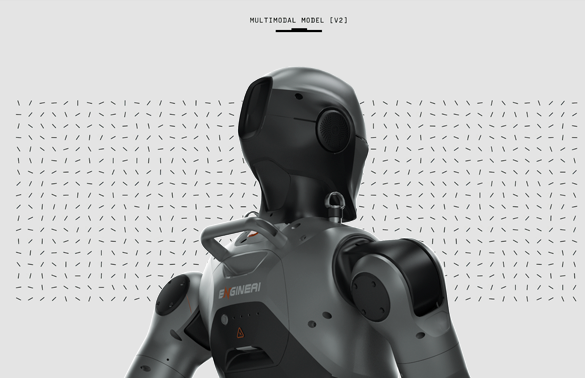
交互核心屏
打造多维度智能化交互新体验
-
极致开源 共创生态
提供硬件底层接口与训练、部署代码支持

众擎迄今为止最灵活的智能体
基于出色本体运动控制算法结合全栈自研关节驱动,让每个动作精准稳定复现
 播放视频
播放视频
越灵活·越自由
超凡卓越的灵活性 超大宽幅角度活动空间,全身总自由度≥23






单臂自由度
5

单腿自由度
6

腰部旋转角度
>300 °

头部自由度
拟人化交互体验
5
6
>300 °
拟人化交互体验
PM01高运动性能表现





行止之间 尽显非凡

极致机械美学01

智能交互核心屏02

家族式星环灯03


仿真学习 持续进化
融合光学动捕数据与对抗学习的端到端神经网络,能在仿真环境中高速进化,自适应复杂地形与场景,快速掌握最优策略。


































































































































核心参数

灯光配置
高辨识度家族式星环灯
触摸屏幕
腰部关节运动
>300°
髋关节运动
R-15°~+130°、P-180°~+140°、Y-90°~+230°
机器人脚掌活动
自适应全地形
膝关节运动
-30°~+137°
灯光配置
高辨识度家族式星环灯
触摸屏幕
腰部关节运动
>300°
髋关节运动
R-15°~+130°、P-180°~+140°、Y-90°~+230°

机器人脚掌活动
自适应全地形
膝关节运动
-30°~+137°
详细参数
-
尺寸(商业版)
长 × 宽 × 高(站立状态):
1400(H) x 535.55(W) x 252.66(D)
含电池重量:
约42kg
小腿+大腿长度
686.5mm
手臂臂展
1.44m
总自由度
23
-
运动参数
全关节中空内走线
√
关节运动空间
腰关节:-230°~90°
髋关节:R-15°~+130°、P-180°~+140°、Y-90°~+230°
膝关节:-30°~+137°移动速度
>2m/s(硬件支持)
感知传感器
/
基础算力
4核高性能CPU
高算力模组
/
二次开发
不支持
智能电池(快拆)
10000mAh
续航时间
约2小时
充电功率
54.6V 4.5A
充电速度
约2h充满
灯光配置
眼部灯、臀部灯
手持式遥控器
√
触摸屏幕
×
-
电机型号(Q90H)
关节编码器
双编码
关节类型
全行星
最大力矩(Nm)
145
峰值扭矩密度
130Nm/kg
最高转速(rpm)
6400
减速比
25
质量(kg)
1.1
-
尺寸(教育版)
产品尺寸
1400(H) x 535.55(W) x 252.66(D)
带电池重量
约43kg
小腿+大腿长度
686.5mm
手臂臂展
1.44m
总自由度
24
-
运动参数
全关节中空内走线
√
关节运动空间
腰关节:-230°~90°
髋关节:R-15°~+130°、P-180°~+140°、Y-90°~+230°
膝关节:-30°~+137移动速度
>2m/s(硬件支持)
感知传感器
深度相机2个(头部和腰部)
基础算力
4核高性能CPU
高算力模组
NVIDIA Jetson Orin NX (16G)
二次开发
支持
智能电池(快拆)
10000mAh
续航时间
约2小时
充电功率
54.6V 4.5A
充电速度
约2小时充满
灯光配置
眼部灯、臀部灯
手持式遥控器
√
触摸屏幕
√
-
电机型号(Q25H)
关节编码器
双编码
关节类型
全行星
最大力矩(Nm)
50
峰值扭矩密度
100 Nm/kg
最高转速(rpm)
8400
减速比
25
质量(kg)
0.5



![[x]](/static/home/images/closeicon1.svg)